carla simulator를 빌드하고나면 기본적으로 주어지는 아주 좋은 지도들이 있다. default값으로 Town03을 이용하게 되지만 다른 지도를 불러들여서 사용도 가능하다.
그럼에도 나는 개인적으로 지도를 만들어서 테스트 케이스에 적용하려고 한다. 수많은 교차 환경을 다양하게 만들어두고 각 지점을 통과하는 특별하고도 조금은 복잡한 시스템에서 테스트를 하고 싶다. 그래서 단계별로 난이도별로 지도를 생성해두고 테스트를 거치려 한다.
carla에서는 mathworks가 인수한 roadrunner를 통해서 지도를 생성하는 방법을 가이드하고 있다. 프로그램을 통해서 지도를 생성하고 export하고 carla에서 다시 import하는 방법 말이다. roadrunner는 지도를 생성하는데 너무나도 쉬운 조작으로 간단하게 생성할 수 있는 프로그램이라서 도로나 마커, 신호등, 다리 등을 빠른 시간에 만들어낸다. 클릭 몇번으로 도로를 생성하고 확장하고 늘리고 줄이고 교차로로 연결하고 다리를 만드는 등 너무나도 쉽다. 물론 실제 수치지형도를 이용해서 만든 데이터를 가지고와서 등고선에 맞게 도로를 편집하는 등의 GIS 데이터 역시도 아주 쉽게 불러와서 도로등을만들 수 있다.
이런 프로그램은 그냥 구매하거나 학생 구매하거나 carla Leaderboard를 참가하여 사용할 수 있다. 물론 나는 carla Lreaderboard에 참가하는 사용자로 1년 라이센스를 받아서 사용중이다.
지도의 난이도를 위한 시나리오로
1. 단일 교차로
2. 교차 후 차선 변경
3. 고속도로 진 출입
4. 원형교차로
5. 연속 교차로
6. 긴급 전용로 통과
등 이 있다.
물론 신호등이 없는 환경이다.
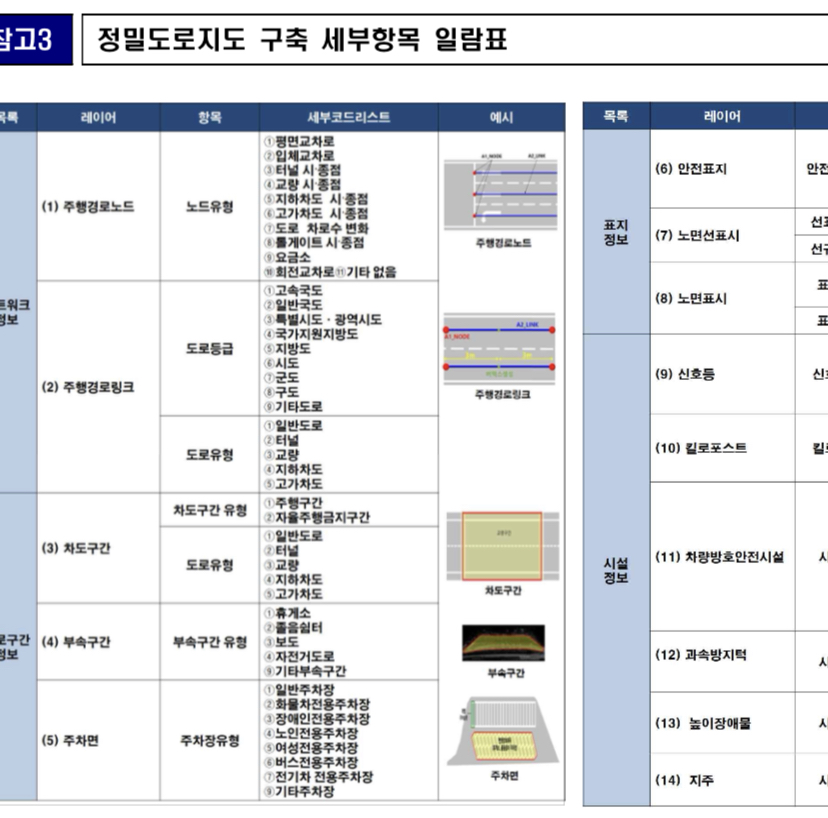
국토지리정보원에서 제공하고 있는 각종 지도 데이터를 바탕으로 실제 국내 지형에 맞는 지도로 시뮬레이션을 진행한다. 특히 정밀도로지도는 고속도로나 일부 지역에서 생성되었다.
모든 이동체는 속도의 변화가 평균값을 유지를 위한 범위 내에 있어야하며 변화하는 환경에 즉각 대응 할 수 있어야 한다. 변화하는 환경이란 수동제어 이동체에 대한 대응이나 긴급이동체로 인해 새로 생성된 경로 대응, 재해등으로 일부 경로 삭제 등이 있다.
이 모든 테스트는 시뮬레이션을 통해서 선 테스트 진행하며 이후 pmsm모터 개발과 동시에 하드웨어 테스트 진행 예정이다.
끝.
'단순 기록' 카테고리의 다른 글
| readthedocs (0) | 2021.09.01 |
|---|---|
| carla ros bridge (0) | 2021.08.30 |
| docker컨테이너에서 debug with webstorm IDE (0) | 2021.08.15 |
| carla 0.9.12 (0) | 2021.08.15 |
| 모카 실행 반복하면 테스트 실패 (0) | 2021.08.01 |
